Théorème principal (Hopcroft & Wilfong):
Il existe mouvement de rotations et de translations entre 2 configurations où les objets forment une composante connexe,
⟹ il existe un mouvement entre ces 2 configurations tel qu’à tout instant, les objets forment une composante connexe.
De l’importance de la contractilité
L’espace des configurations n’est pas contractile
⟹ le théorème ne s’applique pas
Ensembles de configurations
| Ensemble | Configurations $x$ en lesquelles |
|---|---|
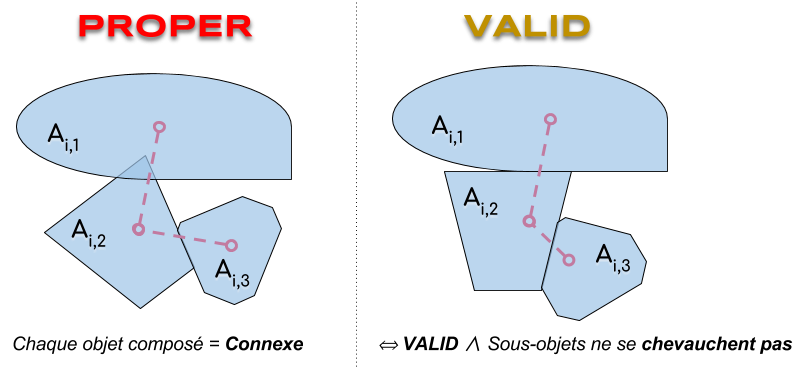
| PROPER | chaque objet composé a un graphe associé connexe (objets composés connexes et configurations propres) |
| VALID | chaque objet composé est connexe et est tel que tous les sous-objets qui s’intersectent se touchent (configurations valides) |
| Ensemble | Configurations $x$ valides telles qu’il existe (au moins) deux objets |
|---|---|
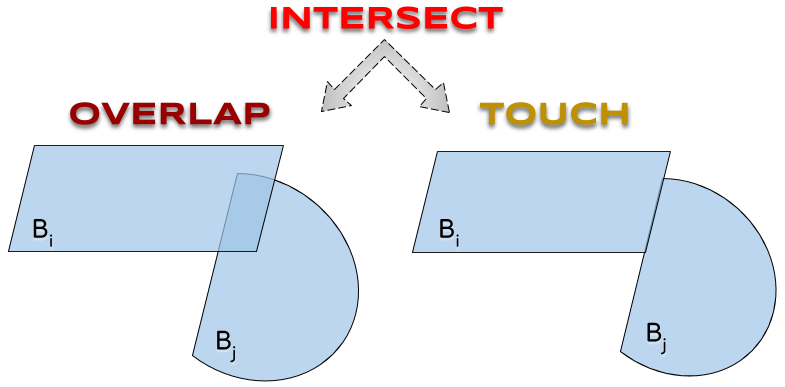
| INTERSECT | qui s’intersectent en $x$ |
| OVERLAP | qui se chevauchent en $x$ |
| TOUCH | qui se touchent en $x$ |
| Ensemble | Configurations $x$ propres telles que |
|---|---|
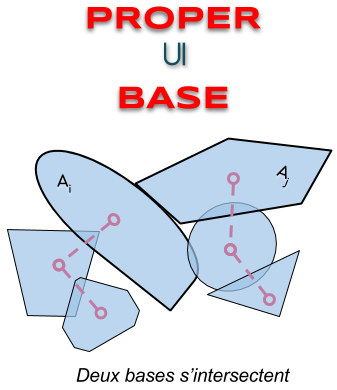
| BASE | la base d’un objet composé intersecte la base d’un autre |
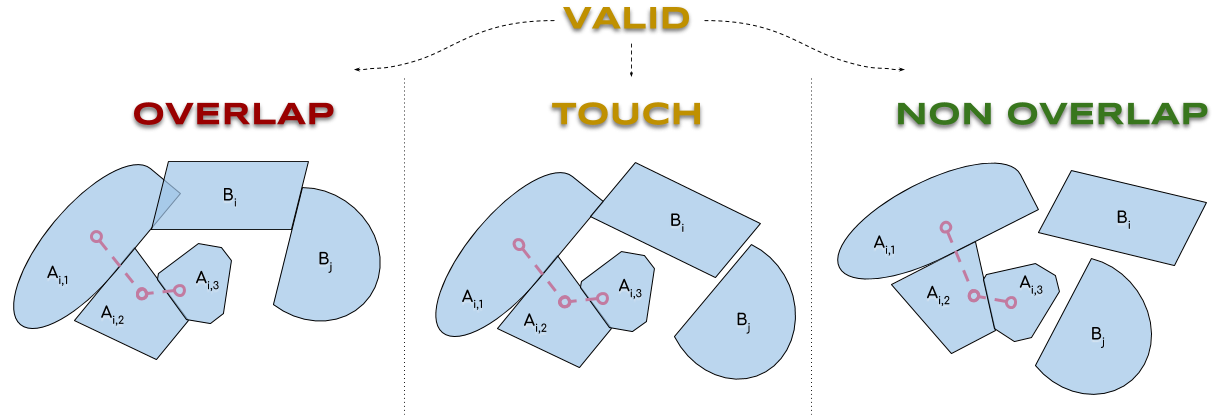
Enfin, on pose
$$\NON ≝ \VALID\backslash\OVER \\\FILL ≝ \cl(\OVER) ∪ \BASE$$
Pourquoi ?:
En ajoutant $\BASE \not⊆ \VALID$ à $\cl(\OVER)$, on rend$$\NON ∪ \FILL\\ = \NON ∪ \cl(\OVER) ∪ \BASE$$contractile.
Détermination de TOUCH
Attention avec TOUCH
Connexité et contractilité
Intuitivement:
- l’homologie est l’ensemble des invariants topologiques de $X$, indiqués par des groupes d’homologie
- le $k$-ième groupe d’homologie $H_{k}(X)$ a autant de copies de $ℤ$ que $X$ contient de "trous" de dimension $k$