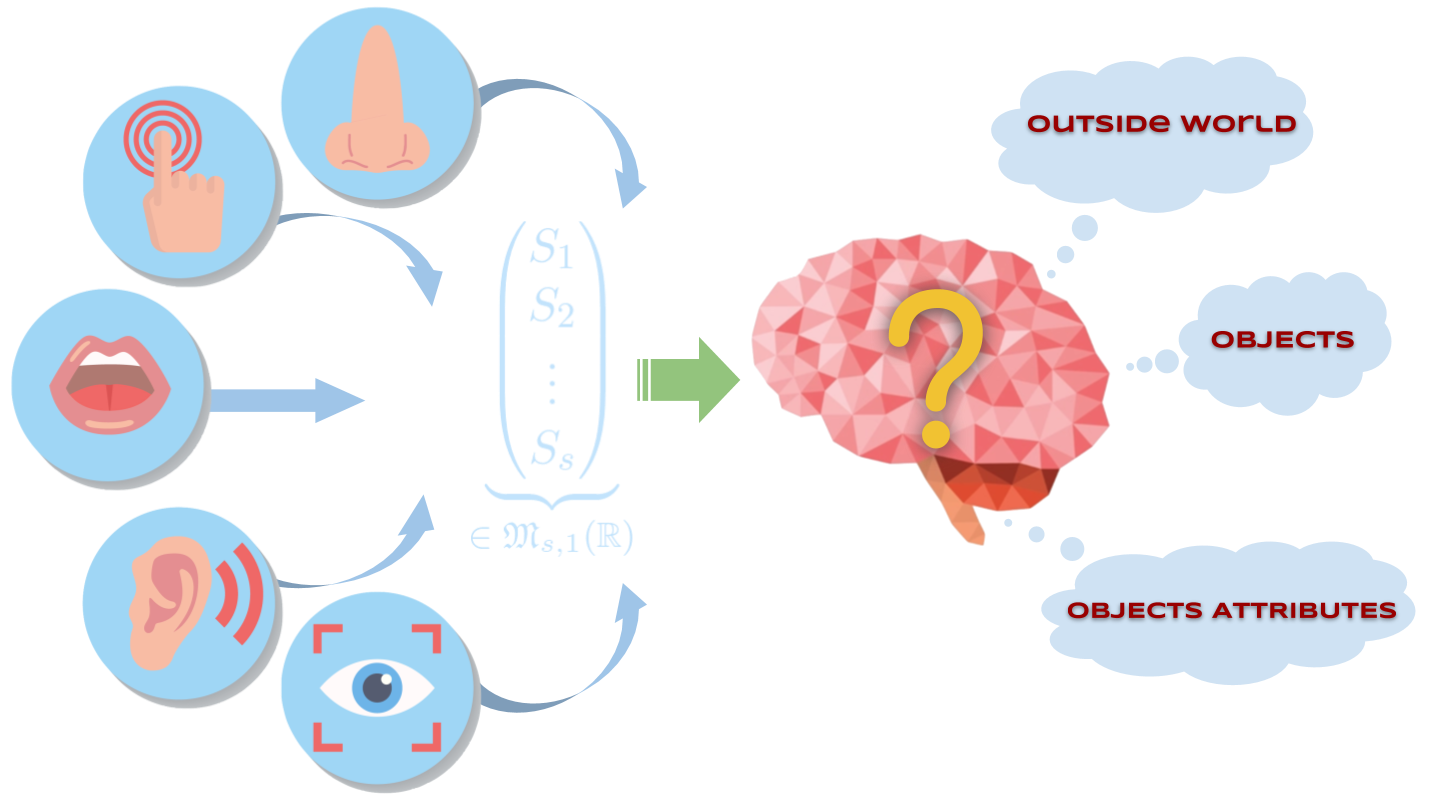
Introduction: you said “space”?
high-dimensional sensory input vector$\qquad \overset{\text{Brain}}{\rightsquigarrow} \qquad \underbrace{\textit{space, attributes, ...}}_{\text{easier to visualize}}$
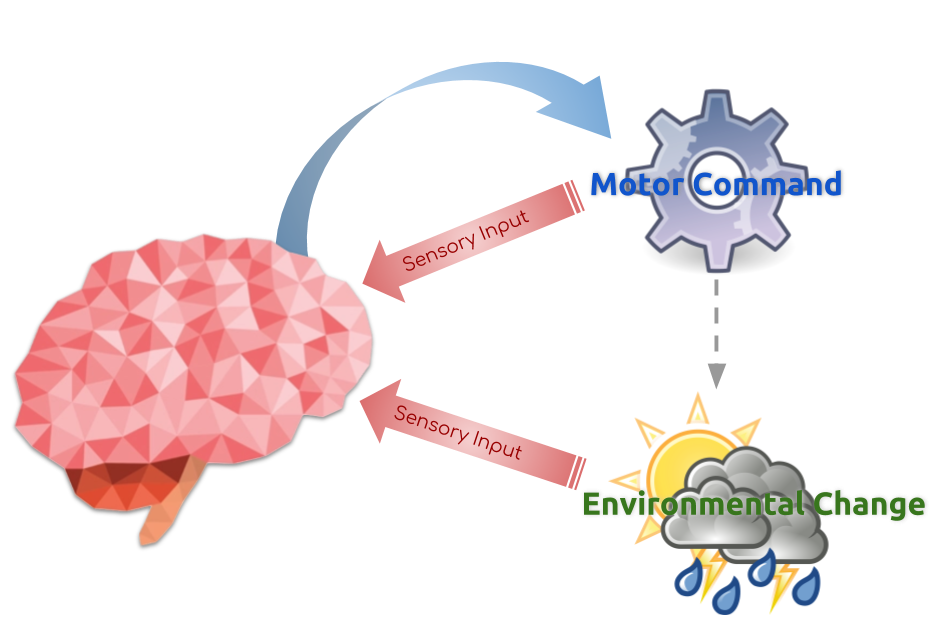
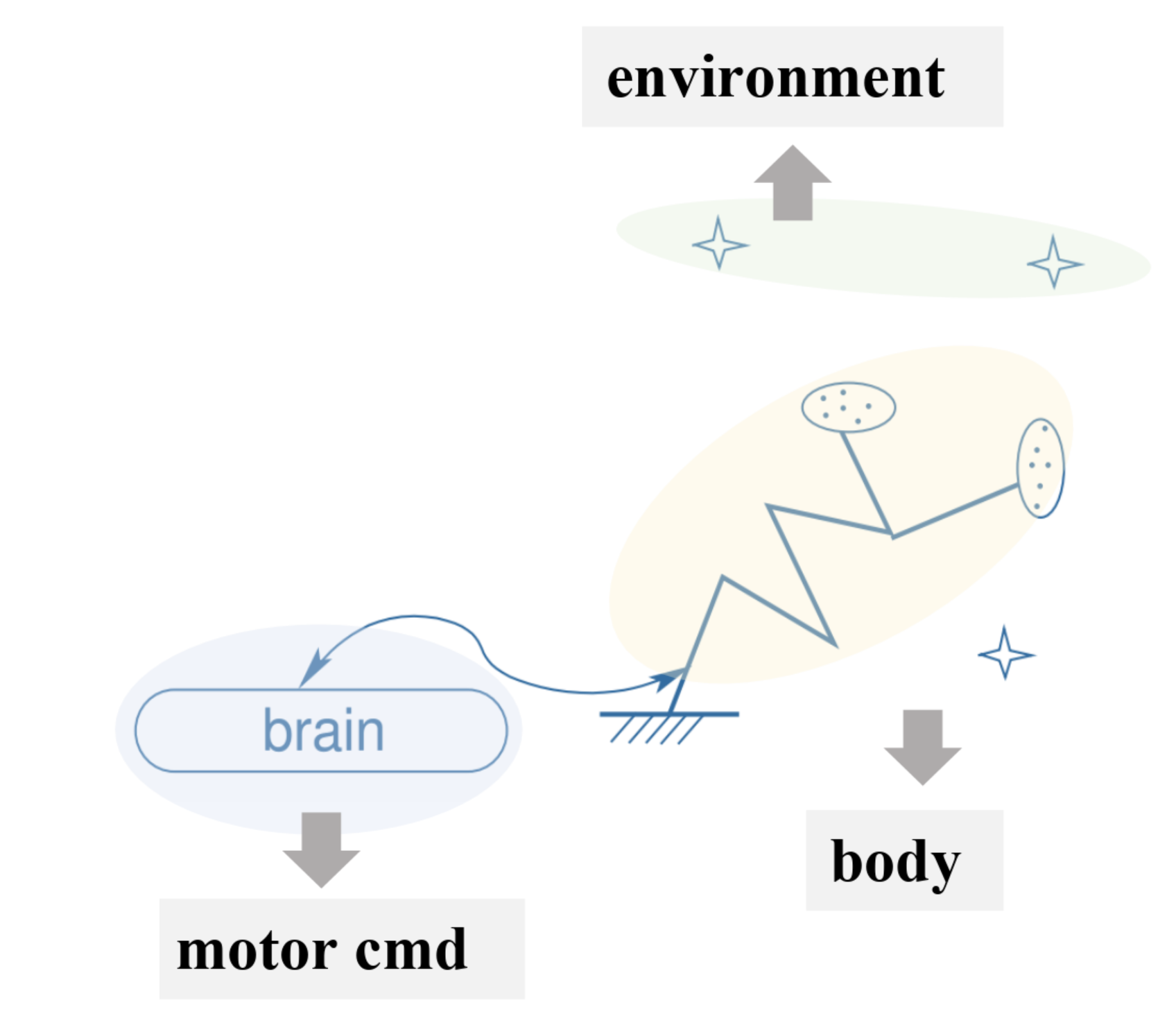
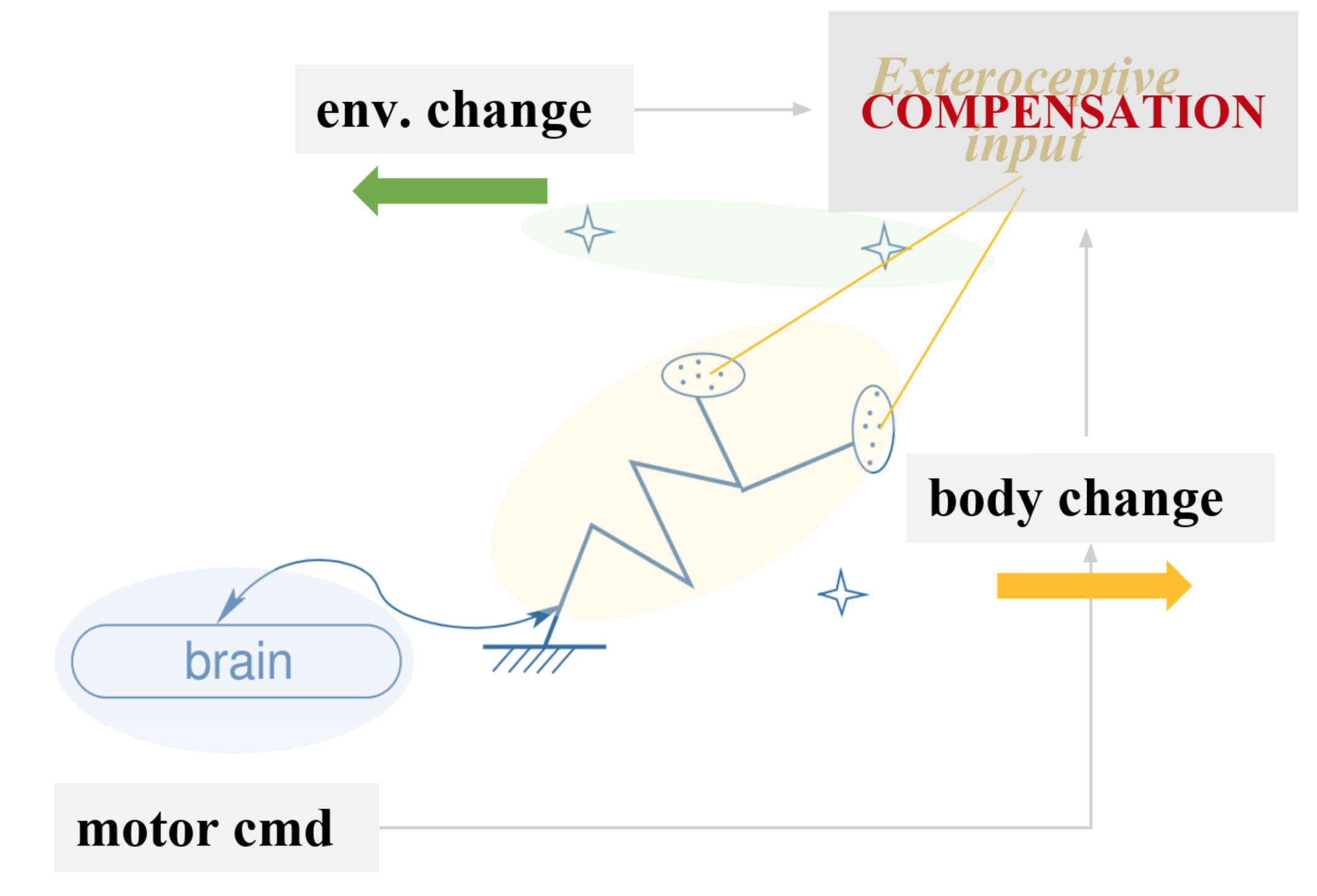
- All the brain can do:
-
-
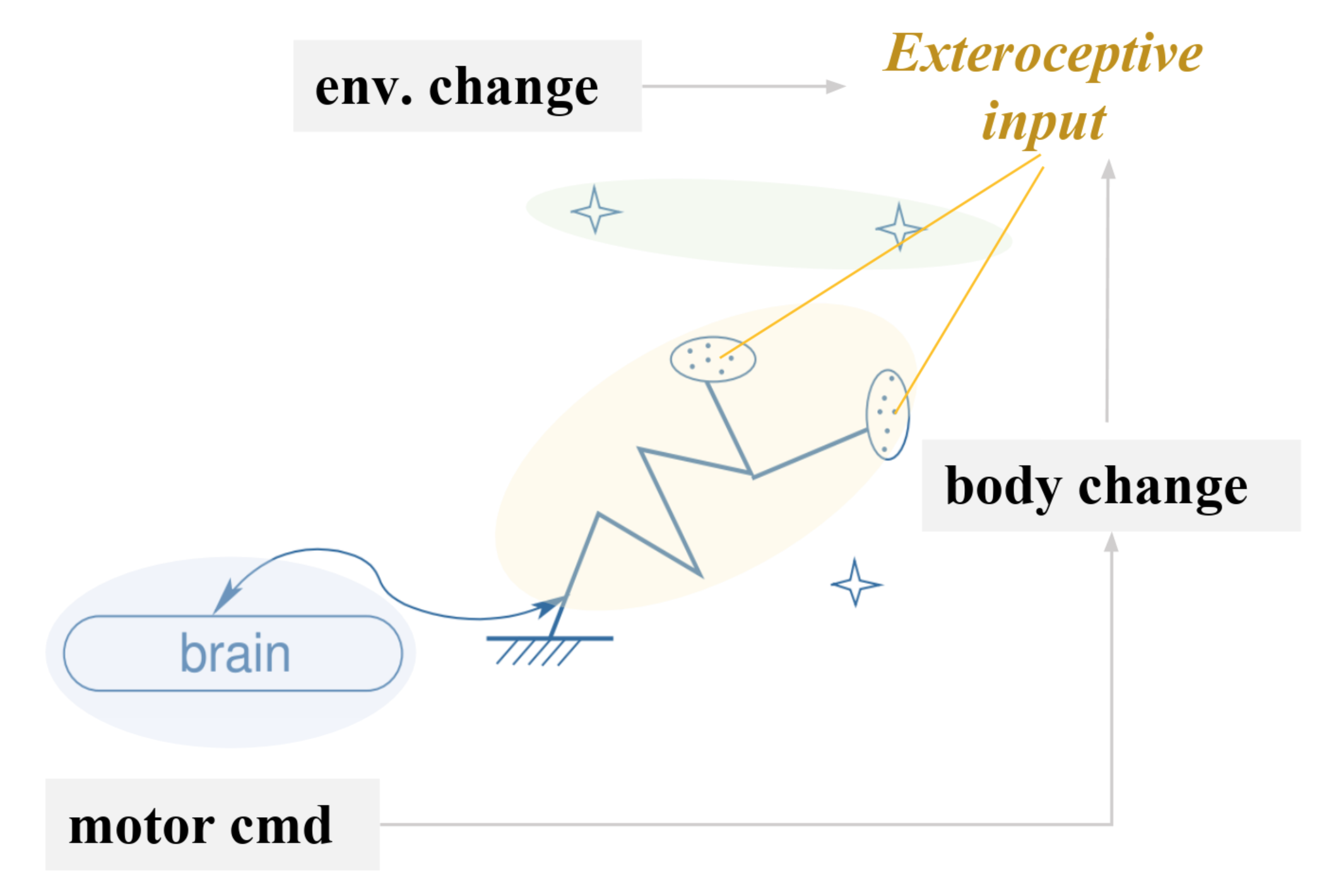
issue motor commands
-
observe the resulting environmental changes
⟹ then collect sensory inputs
-
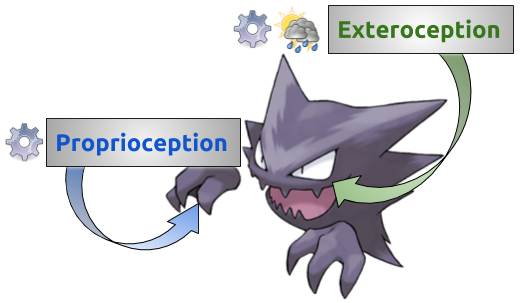
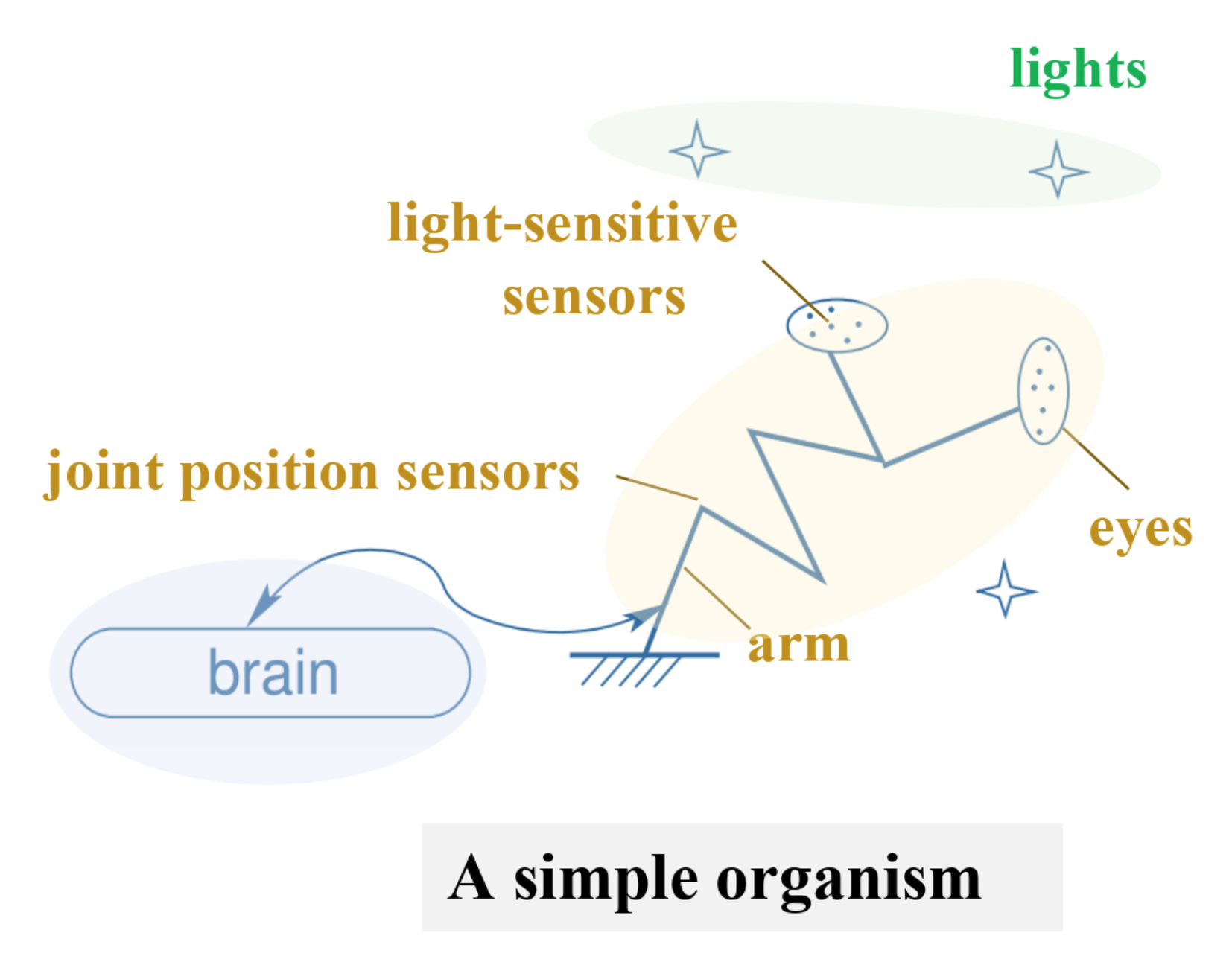
I. - Exteroception & Compensation
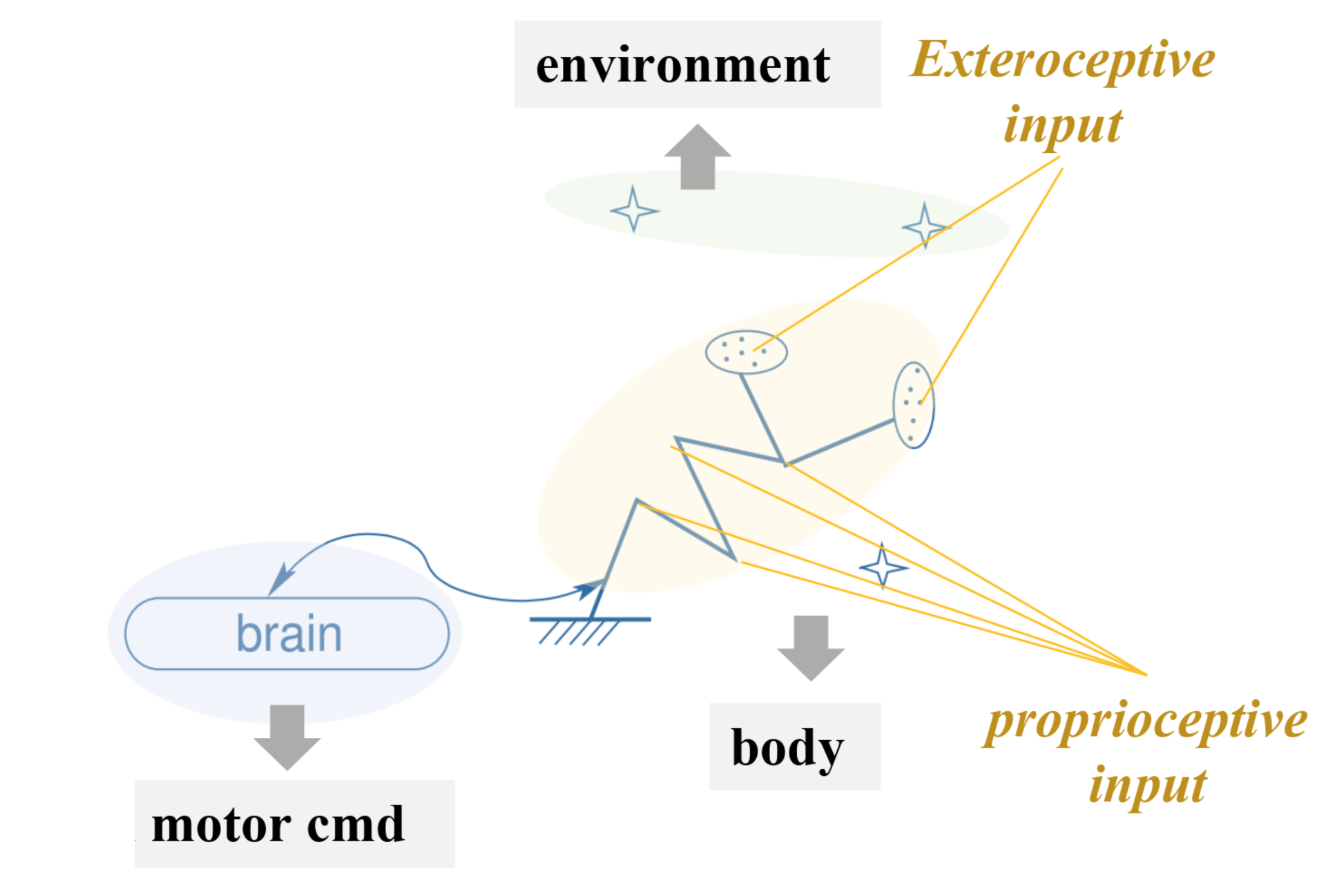
I.A Exteroception vs. Proprioception
| Sensory input | Definition |
|---|---|
| Proprioceptive | independent of the environment |
| Exteroceptive | dependent of the environment |
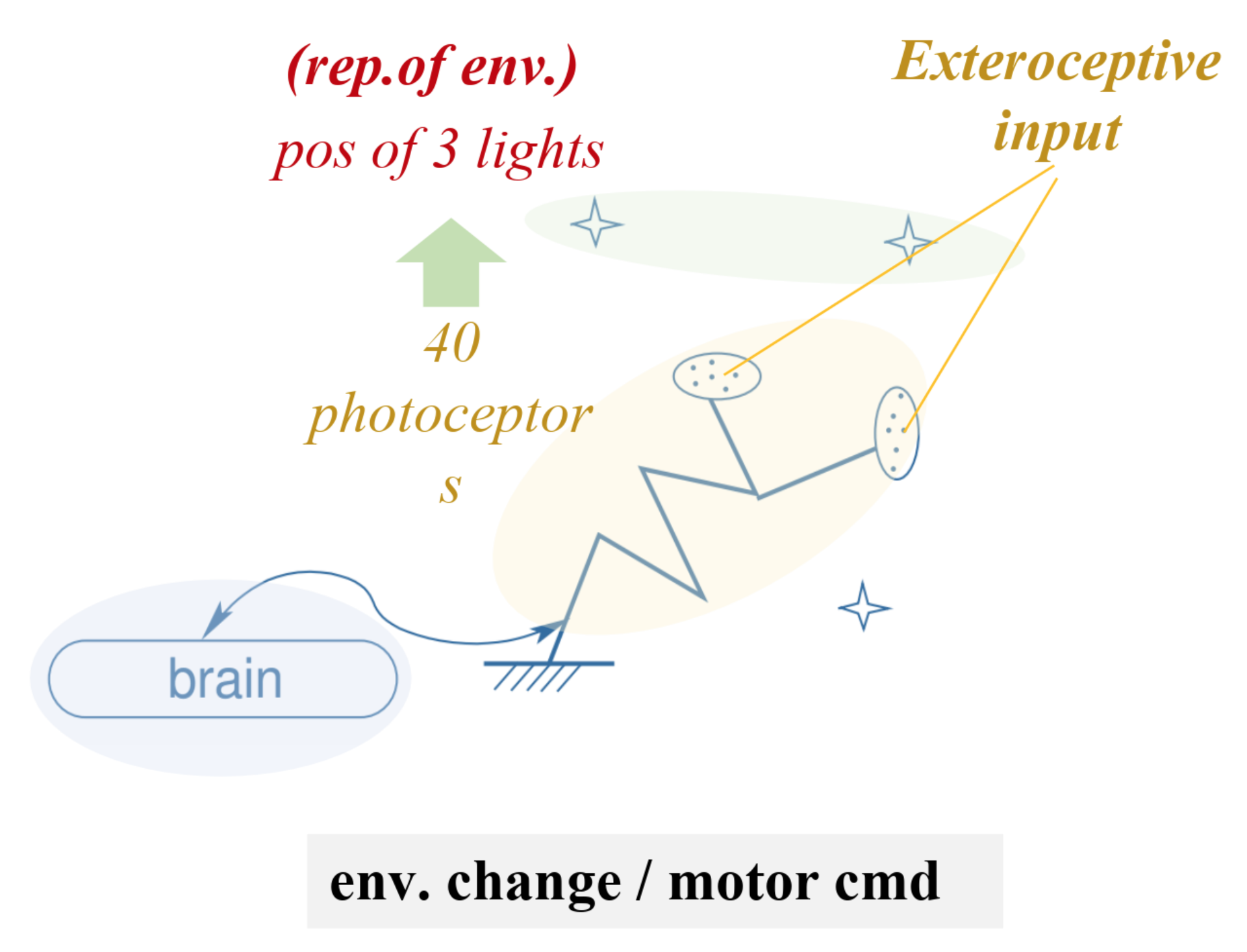
Example
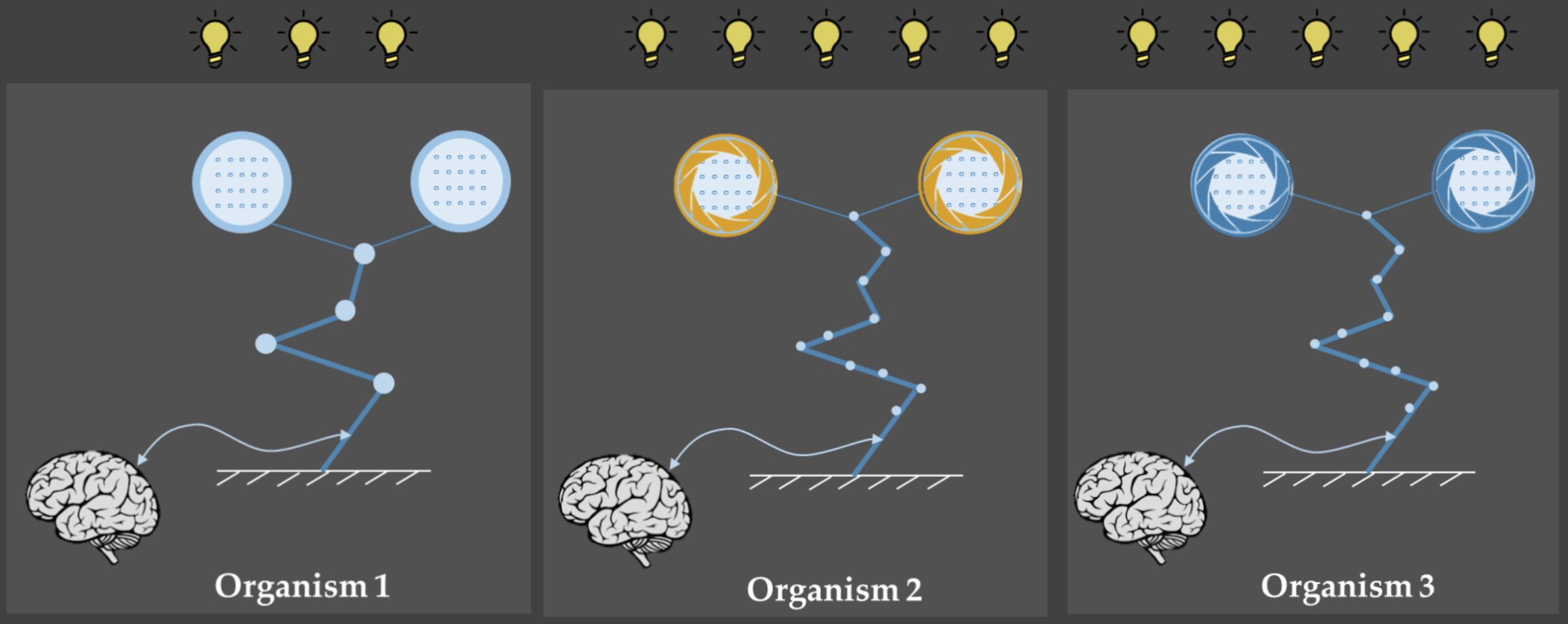
I.B - Compensated movements
- Compensated movements:
- Variations of the motor command and the environment that compensate one another.
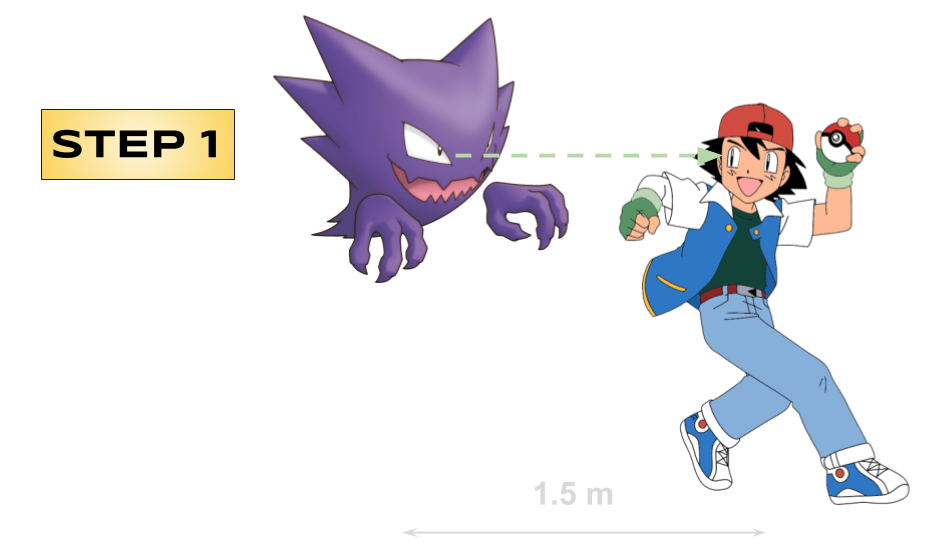
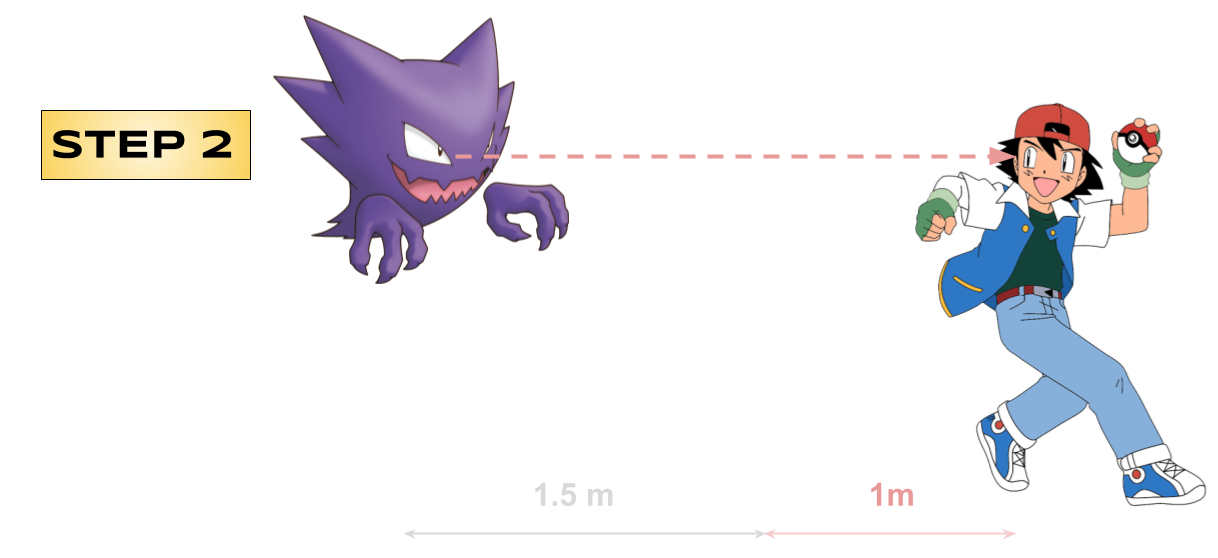
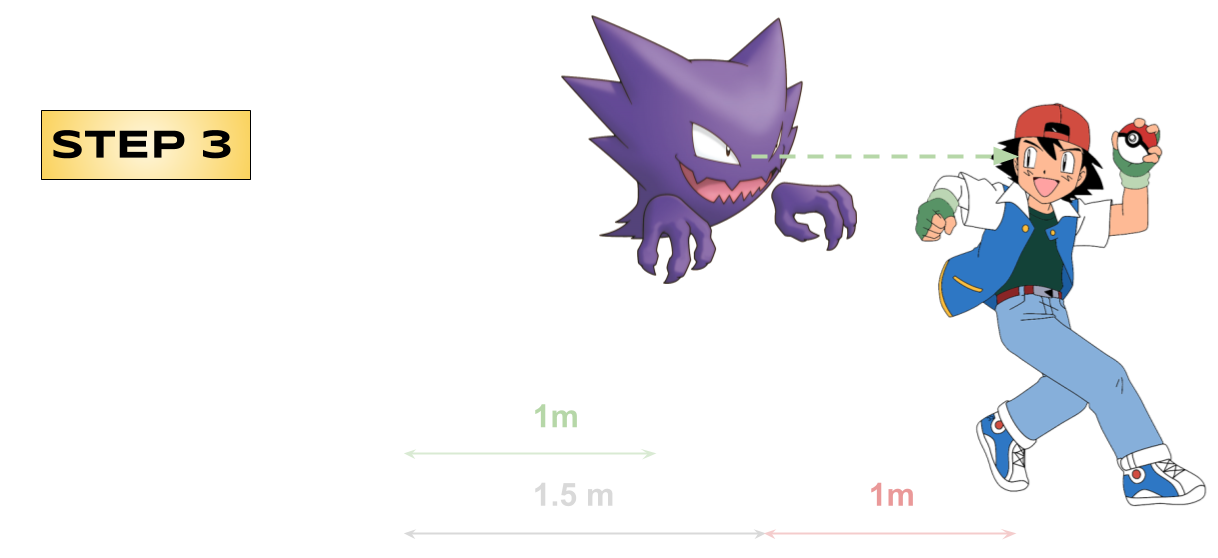
Relative distance between them is the same at steps 1 & 3
Organism 1
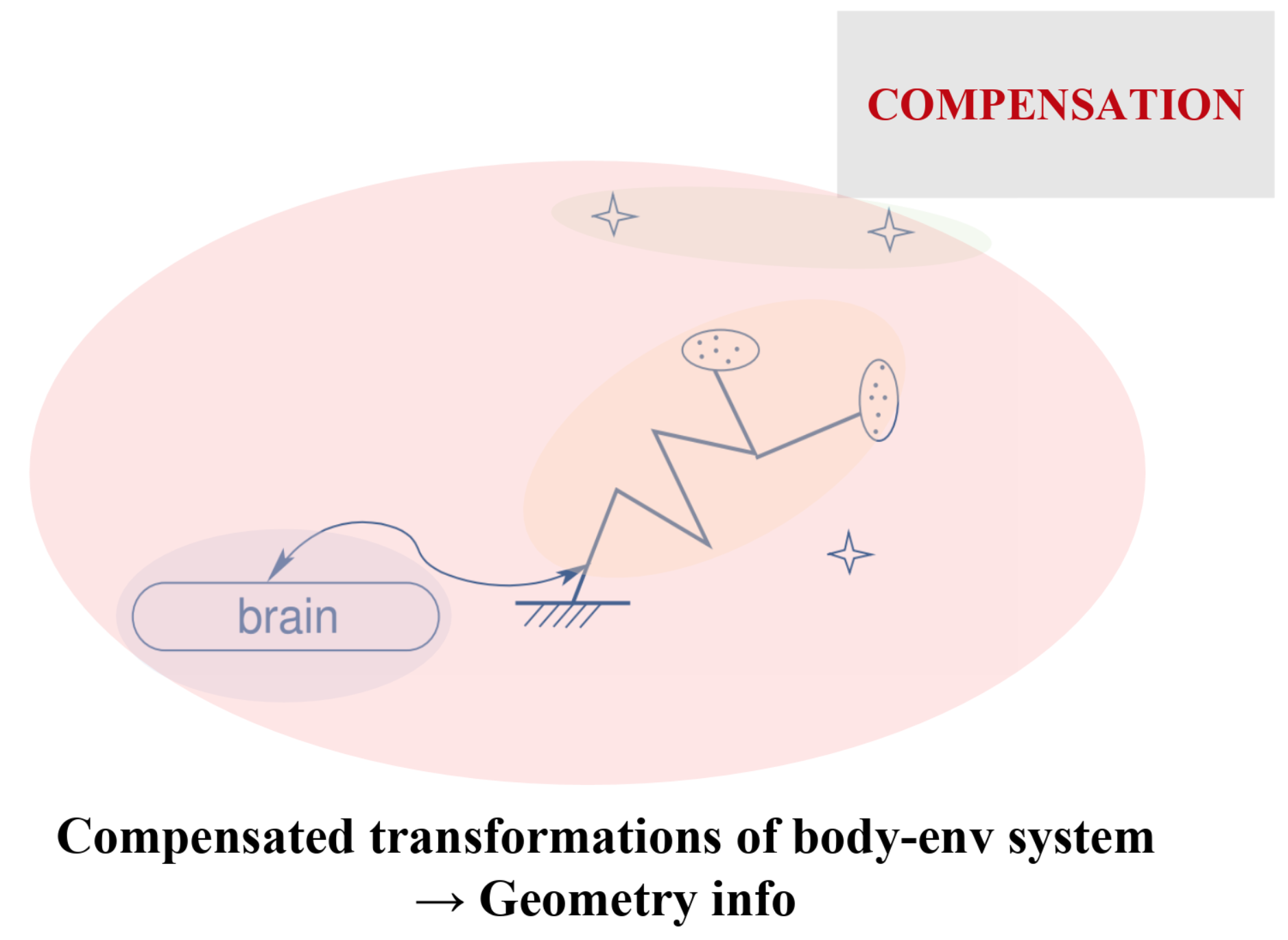
Compensable movements: exactly what stems from the notion of the physical space in the sensory inputs
So the true goal: computing the dimension of the rigid group of compensated movements.
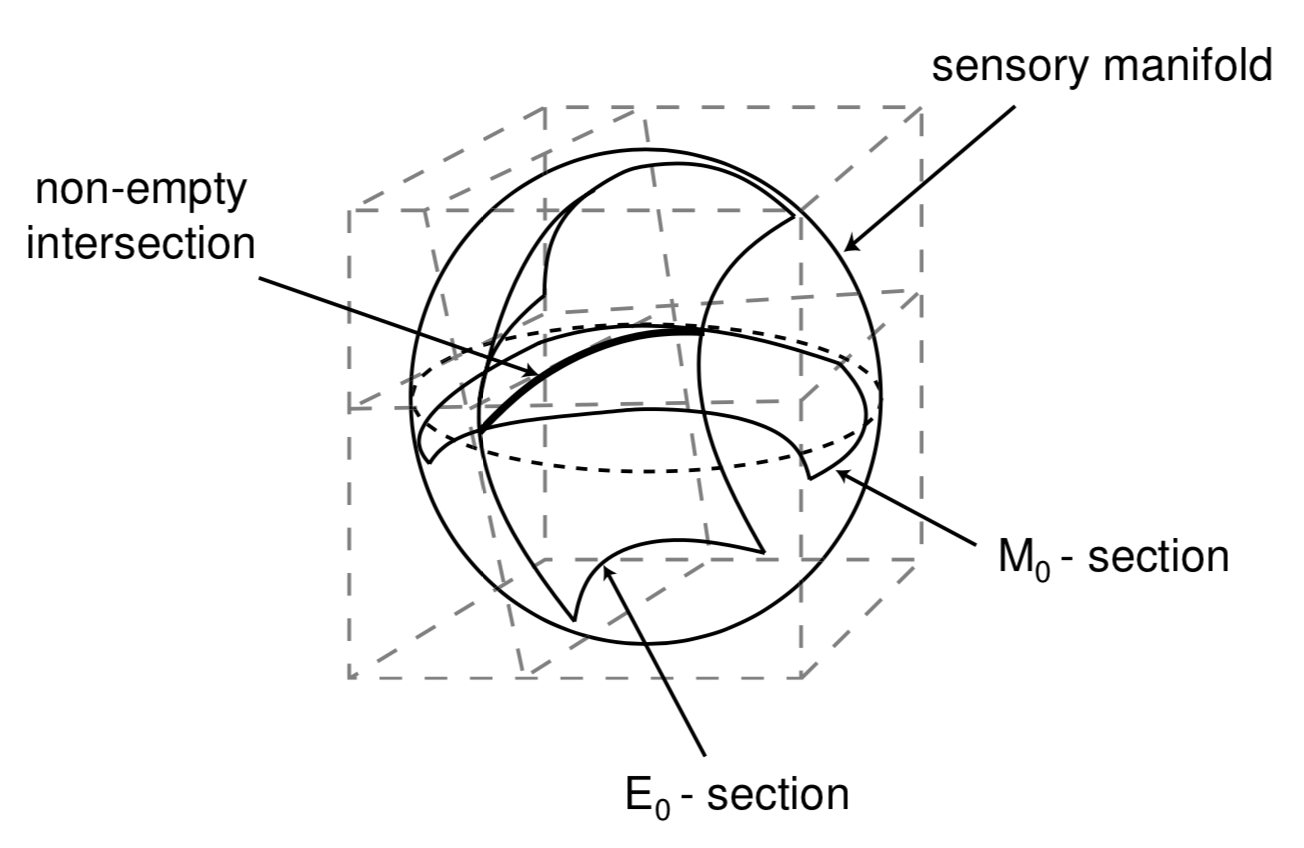
Pushforward of $(M_0, E_0)$ by $ψ$
⟹ Tangent space at $S_0 ≝ ψ(M_0, E_0)$:
$$\lbrace dS \rbrace = \lbrace dS \rbrace_{dE=0} + \lbrace dS \rbrace_{dM=0}$$
Moreover:
- $\lbrace dS \rbrace_{dE=0}$ is the tangent space of $ψ(E_0, \mathcal{M})$ at $S_0$
- $\lbrace dS \rbrace_{dM=0}$ is the tangent space of $ψ(\mathcal{E}, M_0)$ at $S_0$
Algorithm
Get rid of proprioceptive inputs # (these don't change when no motor command is issued and the environment changes) for "source" in [motor commands, environment, both]: Estimate dim(space of sensory inputs resulting from "source" variations) dim(compensated movements) = dim(inputs resulting from motor commands variations) + dim(inputs resulting from environment variations) - dim(inputs resulting from both variations)
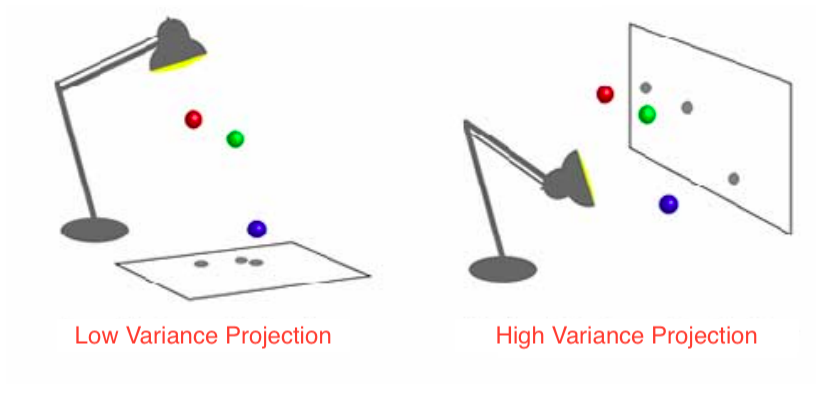
Principal Component Analysis
Goal: Find orthogonal axes onto which the variance of the data points under projection is maximal, i.e. find the best possible “angles” from which the data points are the most spread out.
Implementation
Neurorobotics_Project
│ index.md
│
└───sensorimotor_dependencies
│ │ __init__.py
│ │ utils.py
│ │ organisms.py
│
└───docs
│ ...
where
- utils.py ⟹ utility functions, among which dimension reduction algorithms
- organisms.py ⟹ Organism1(), Organism2(), Organism3()
Other organisms